Spis treści:
- Wprowadzenie do teorii grafów: podstawy i zastosowania
- Jak działa algorytm Dijkstry
- Historia algorytmu Dijkstry: od pomysłu do implementacji
- Algorytm Dijkstry w Pythonie: implementacja krok po kroku
- Algorytm A*: omówienie i zastosowanie
- Wydajna implementacja algorytmu A* w Pythonie
- Porównanie algorytmów Dijkstry i A*: Który wybrać?

Rozpoczęcie przygody z IT: 5 kroków do sukcesu w Twojej firmie Kariera
Dowiedz się więcejWprowadzenie do teorii grafów: podstawy i zastosowania
Teoria grafów to kluczowa dziedzina matematyki i informatyki, zajmująca się badaniem grafów, które składają się z wierzchołków i krawędzi. Grafy odgrywają ważną rolę w modelowaniu systemów i relacji występujących w życiu codziennym. Są wykorzystywane w różnych dziedzinach, takich jak informatyka, media społecznościowe, systemy transportowe i wiele innych. Zrozumienie grafów pozwala nam analizować złożone struktury i optymalizować procesy, dzięki czemu teoria grafów jest niezbędnym narzędziem we współczesnych badaniach i technologii.
Algorytm Dijkstry to skuteczna metoda znajdowania najkrótszych ścieżek w grafach. Pozwala nam określić minimalną odległość między wierzchołkami, co czyni go niezbędnym w takich dziedzinach jak nawigacja, systemy transportowe i analiza sieci. Ze względu na swoją wszechstronność i szybkość, algorytm Dijkstry jest szeroko stosowany w aplikacjach wymagających optymalizacji tras i minimalizacji kosztów.
Grafy mogą być skierowane lub nieskierowane, w zależności od charakteru połączeń między wierzchołkami. Krawędzie grafu mogą mieć wagi odzwierciedlające siłę lub koszt połączenia. Na przykład w grafach sieci społecznościowych użytkownicy są wierzchołkami, a połączenia przyjacielskie krawędziami. Połączenia te można mierzyć częstotliwością wymiany wiadomości, co pozwala na analizę interakcji sieciowych. Wykresy odgrywają ważną rolę w różnych dziedzinach, takich jak analiza danych, sieci komputerowe i badania społeczne, zapewniając wydajne metody przedstawiania i przetwarzania informacji o relacjach.
Zastosowania grafów wykraczają poza sieci społecznościowe i obejmują szeroki zakres dziedzin. Grafy są aktywnie wykorzystywane w informatyce do analizy struktury sieci, w logistyce transportu do optymalizacji tras oraz w bioinformatyce do modelowania interakcji między cząsteczkami biologicznymi. W finansach grafy pomagają identyfikować relacje między aktywami, a w telekomunikacji – zarządzać węzłami sieci. Grafy odgrywają zatem kluczową rolę w rozwiązywaniu złożonych problemów w szerokiej gamie dziedzin, zapewniając efektywną reprezentację i przetwarzanie danych.
- modelowanie stron internetowych i ich relacji w Internecie;
- projektowanie sieci dróg, gdzie wierzchołki reprezentują ulice, a krawędzie skrzyżowania;
- badanie interakcji genów, białek i cząsteczek w bioinformatyce;
- optymalizowanie tras logistycznych w dostawie towarów;
- kontrolowanie ruchu robotów w systemach zautomatyzowanych.
Jak działa algorytm Dijkstry
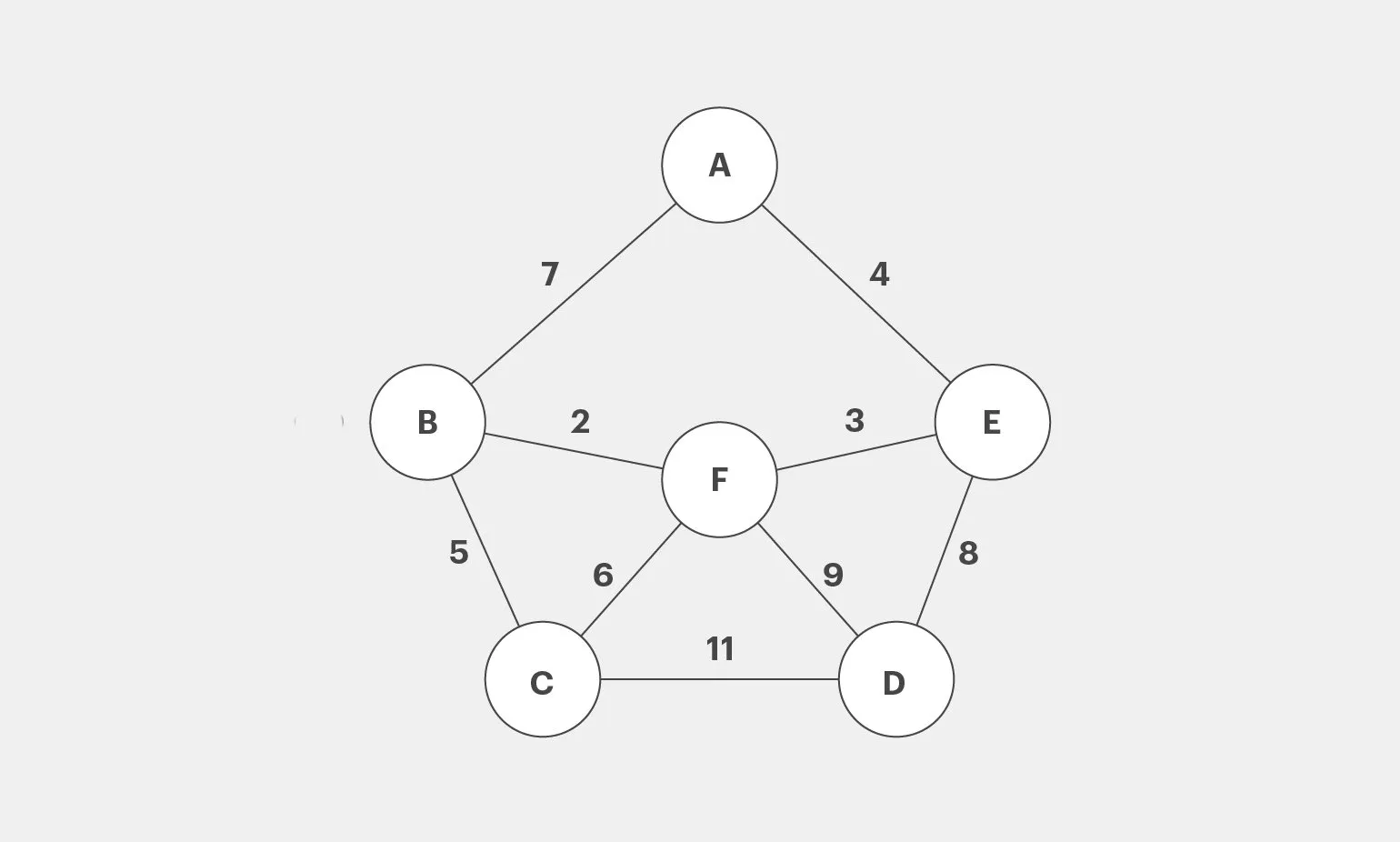
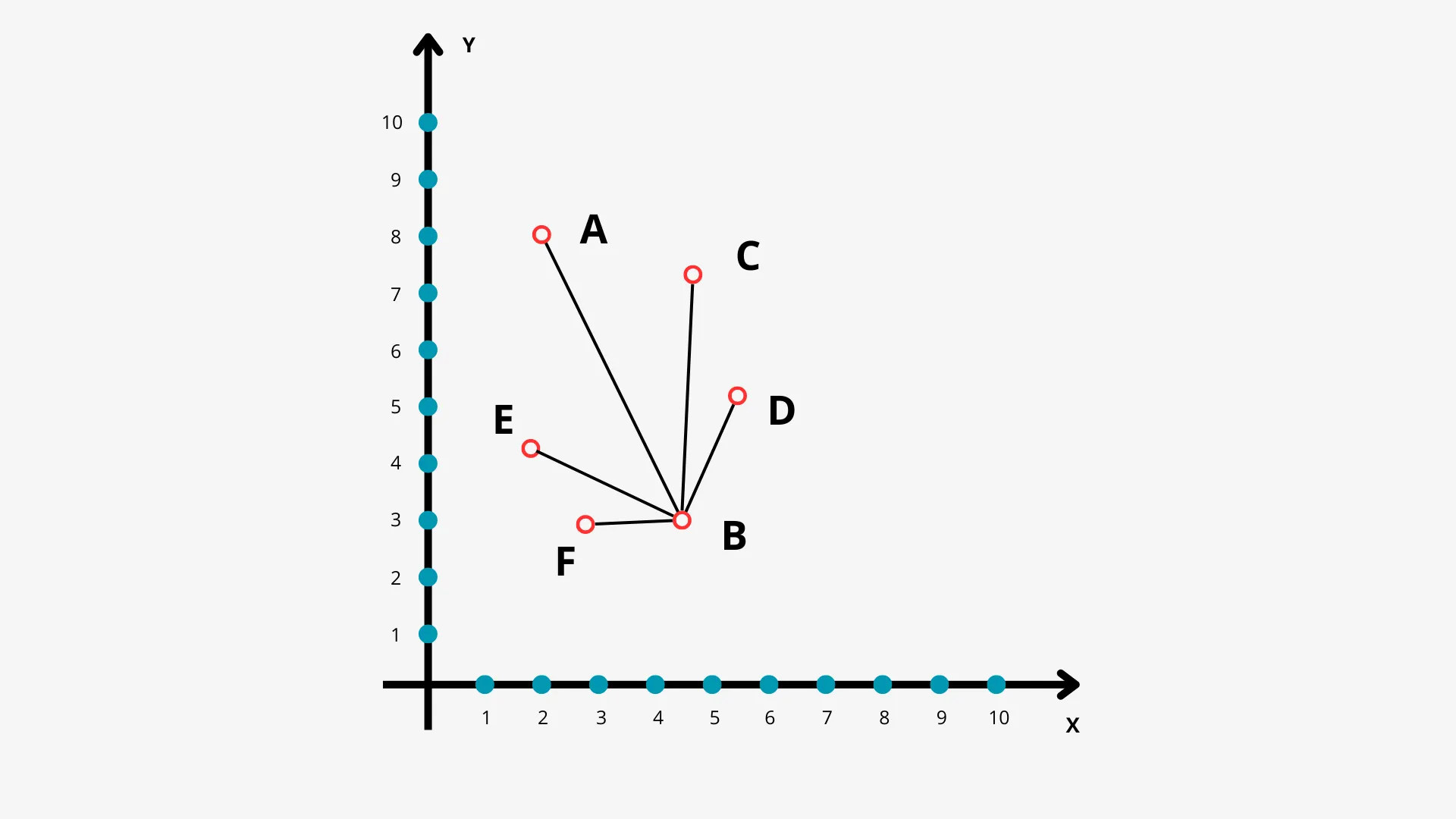
Algorytm Dijkstry to skuteczna metoda znajdowania najkrótszych ścieżek w grafach. Pozwala szybko obliczyć minimalne odległości między wierzchołkami, co czyni go niezastąpionym w problemach z trasowaniem i w wyszukiwarkach. Wykorzystanie algorytmu Dijkstry znacząco optymalizuje procesy związane z wyznaczaniem najkrótszych tras, co jest szczególnie istotne w takich obszarach jak transport, telekomunikacja i sieci komputerowe. Algorytm ten poprawia wydajność i szybkość przetwarzania danych, co jest istotne dla nowoczesnych technologii. W dzisiejszym środowisku, gdzie planowanie tras stało się ważną częścią codziennego życia, istnieje wiele sposobów na znalezienie najkrótszej trasy między miastami, na przykład A, B, C, D, E i F. Aby określić optymalną trasę z miasta A do miasta C, można użyć algorytmów, takich jak algorytm Dijkstry lub algorytm A*. Metody te pozwalają na efektywną analizę sieci drogowej i znalezienie minimalnej odległości między dwoma punktami. Najpierw należy stworzyć mapę pokazującą odległości między wszystkimi miastami. Następnie należy zastosować jeden z wyżej wymienionych algorytmów, który przeanalizuje możliwe trasy, wybierając najkrótszą ścieżkę. Ważne jest, aby uwzględnić nie tylko odległość, ale także potencjalne przeszkody, takie jak korki czy zamknięte drogi, które mogą wpływać na czas podróży. Korzystanie z usług mapowych i aplikacji nawigacyjnych również znacznie upraszcza zadanie znalezienia najkrótszej trasy. Technologie te mogą dostarczać aktualnych informacji o ruchu drogowym i sugerować optymalne trasy w czasie rzeczywistym. Aby szybko znaleźć najkrótszą trasę z miasta A do miasta C, konieczne jest skorzystanie z algorytmów wyszukiwania i nowoczesnych narzędzi nawigacyjnych, które uczynią podróż wygodniejszą i efektywniejszą.
Na pierwszy rzut oka problem wyboru najkrótszej trasy między miastami może wydawać się prosty: konieczne jest porównanie wszystkich możliwych tras, na przykład A → B → C. Jednak wraz ze wzrostem liczby miast (wierzchołków) liczba możliwych tras rośnie wykładniczo, co znacznie komplikuje problem. Zjawisko to jest związane z eksplozją kombinatoryczną, gdzie z każdym dodanym nowym wierzchołkiem liczba kombinacji rośnie wielokrotnie. W rezultacie, aby skutecznie znaleźć najkrótszą ścieżkę, konieczne jest zastosowanie algorytmów optymalizacyjnych i teorii grafów, takich jak algorytm Dijkstry czy algorytm A*, które znacznie skracają czas obliczeń i umożliwiają znalezienie optymalnych tras nawet w złożonych sieciach.
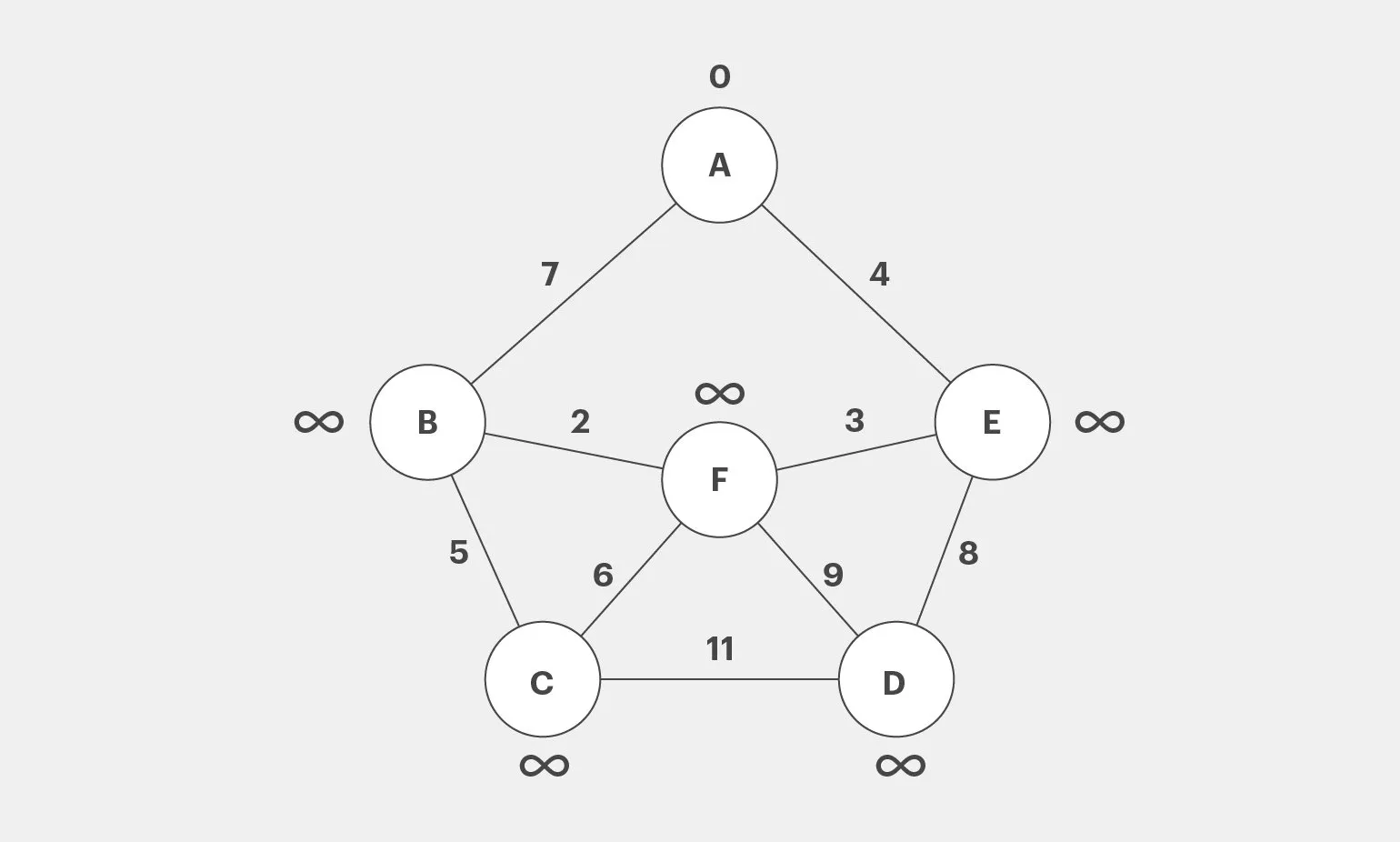
Przy ponad 26 miastach nawet najpotężniejszy superkomputer może potrzebować miliardów lat, aby wyliczyć wszystkie możliwe trasy. W takich sytuacjach z pomocą przychodzi algorytm Dijkstry, skutecznie rozwiązując problemy znalezienia najkrótszej ścieżki. Algorytm ten pozwala na znaczną redukcję czasu obliczeń poprzez optymalizację procesu znajdowania najlepszej trasy między miastami. Algorytm Dijkstry jest kluczowym narzędziem w teorii grafów i jest szeroko stosowany w różnych zastosowaniach, w tym w systemach nawigacyjnych i logistyce. Algorytm ten nie tylko wylicza wszystkie możliwe opcje, ale wykorzystuje podejście zachłanne. Sekwencyjnie wybiera wierzchołki o najmniejszej odległości, zmierzając do danego celu. Ta metoda znacznie skraca czas obliczeń i zapewnia optymalne wyniki. Algorytm zachłanny jest skuteczny w przypadku problemów znalezienia najkrótszej ścieżki, co czyni go popularnym w różnych dziedzinach, takich jak struktury grafów i routing. Wróćmy do naszego problemu i zacznijmy od określenia minimalnych odległości między miastem A a wszystkimi pozostałymi miastami: B, C, D, E i F. Pozwoli nam to lepiej zrozumieć relacje między tymi punktami i zoptymalizować trasy do dalszych obliczeń. W pierwszym kroku ustalimy początkowe wartości odległości od wierzchołka A. Dla samego wierzchołka A odległość będzie wynosić 0, a dla wszystkich pozostałych wierzchołków ustawimy wartość na nieskończoność, ponieważ obecnie nie posiadamy danych na temat odległości do nich.
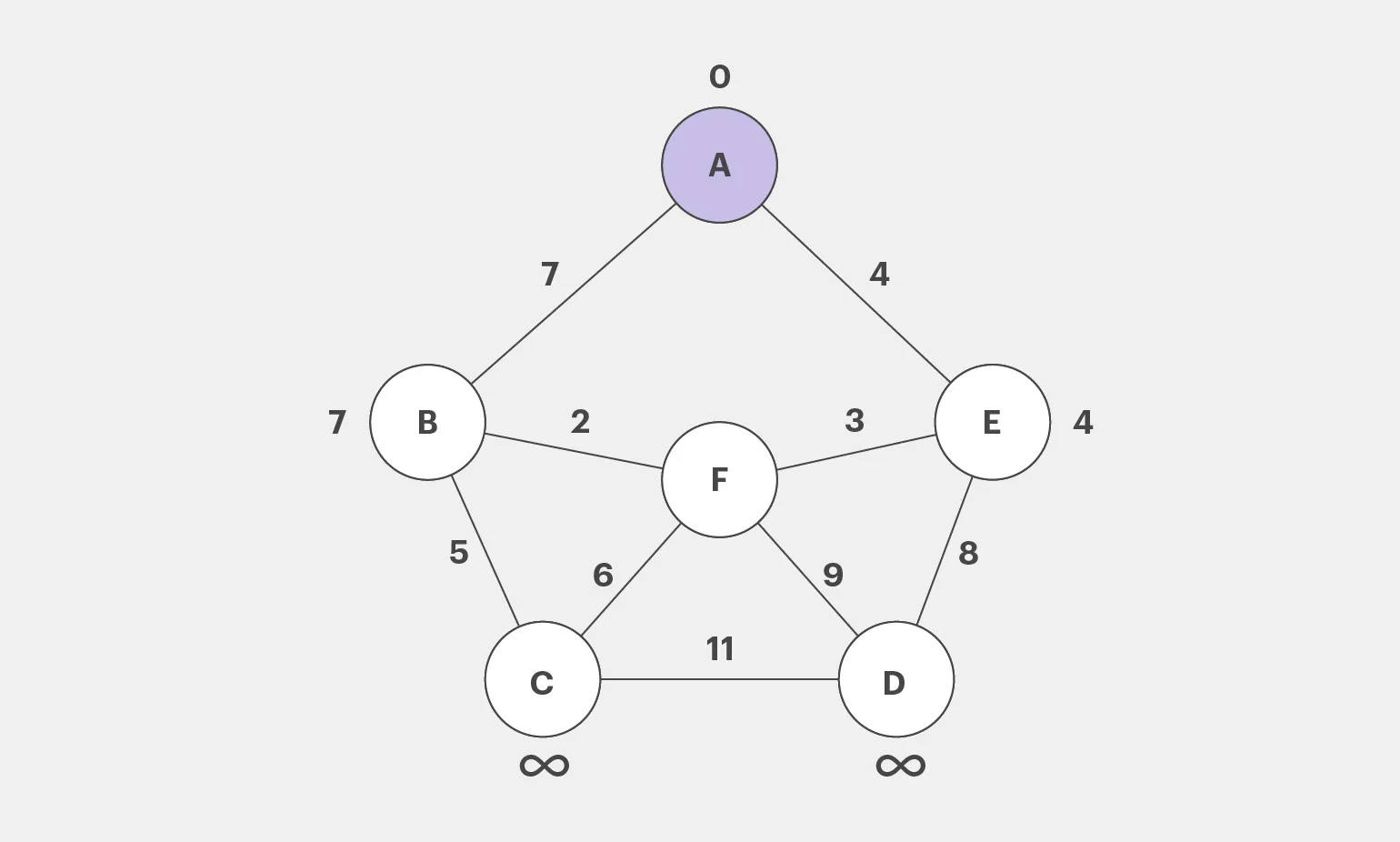
Rozważmy sąsiednie wierzchołki A, czyli B i E, odległości do które wynoszą odpowiednio 7 i 4. Ponieważ te wartości są mniejsze od nieskończoności, zaktualizujemy je w naszym modelu. Oznaczymy wierzchołek A jako odwiedzony. Pozwoli nam to dokładniej oszacować ścieżkę i kontynuować analizę grafu.
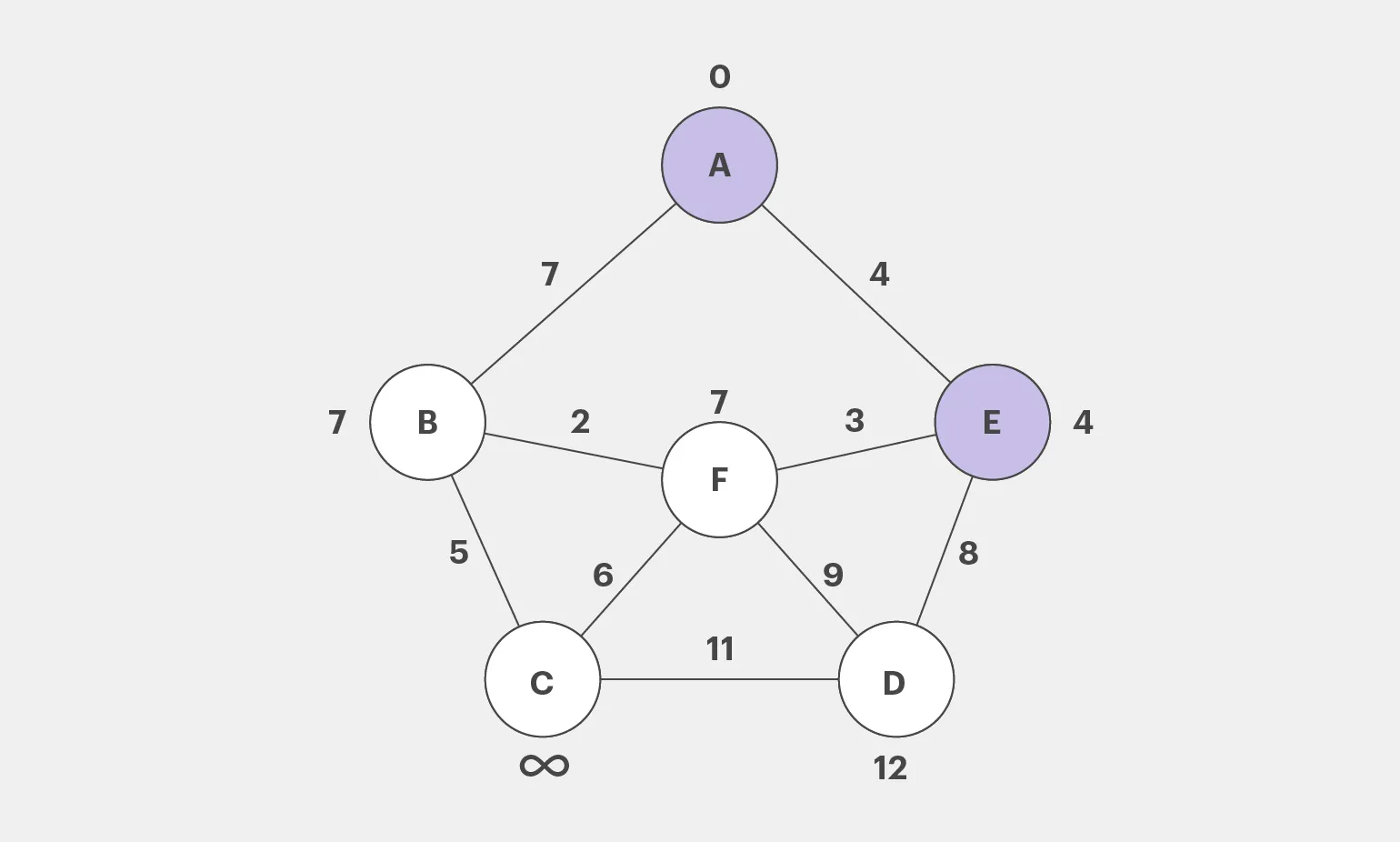
Teraz przejdźmy do wierzchołka o najmniejszej odległości, a mianowicie do E. Jego sąsiedzi, których jeszcze nie odwiedziliśmy, to wierzchołki F i D. Obliczmy odległości do tych wierzchołków:
- Dla F: 4 + 3 = 7
- Dla D: 4 + 8 = 12
Ponieważ nowe wartości są niższe od poprzednich, należy je zaktualizować. Wierzchołek E również zostanie oznaczony jako odwiedzony.
Algorytm kontynuuje wybieranie nieodwiedzonych wierzchołki o minimalnych wartościach i wykonuje obliczenia, aż do momentu, gdy zostanie określona najkrótsza odległość dla każdego wierzchołka. Ten proces zapewnia efektywne wyszukiwanie optymalnych ścieżek w grafach, co jest kluczowym aspektem w problemach analizy trasowania i sieci.
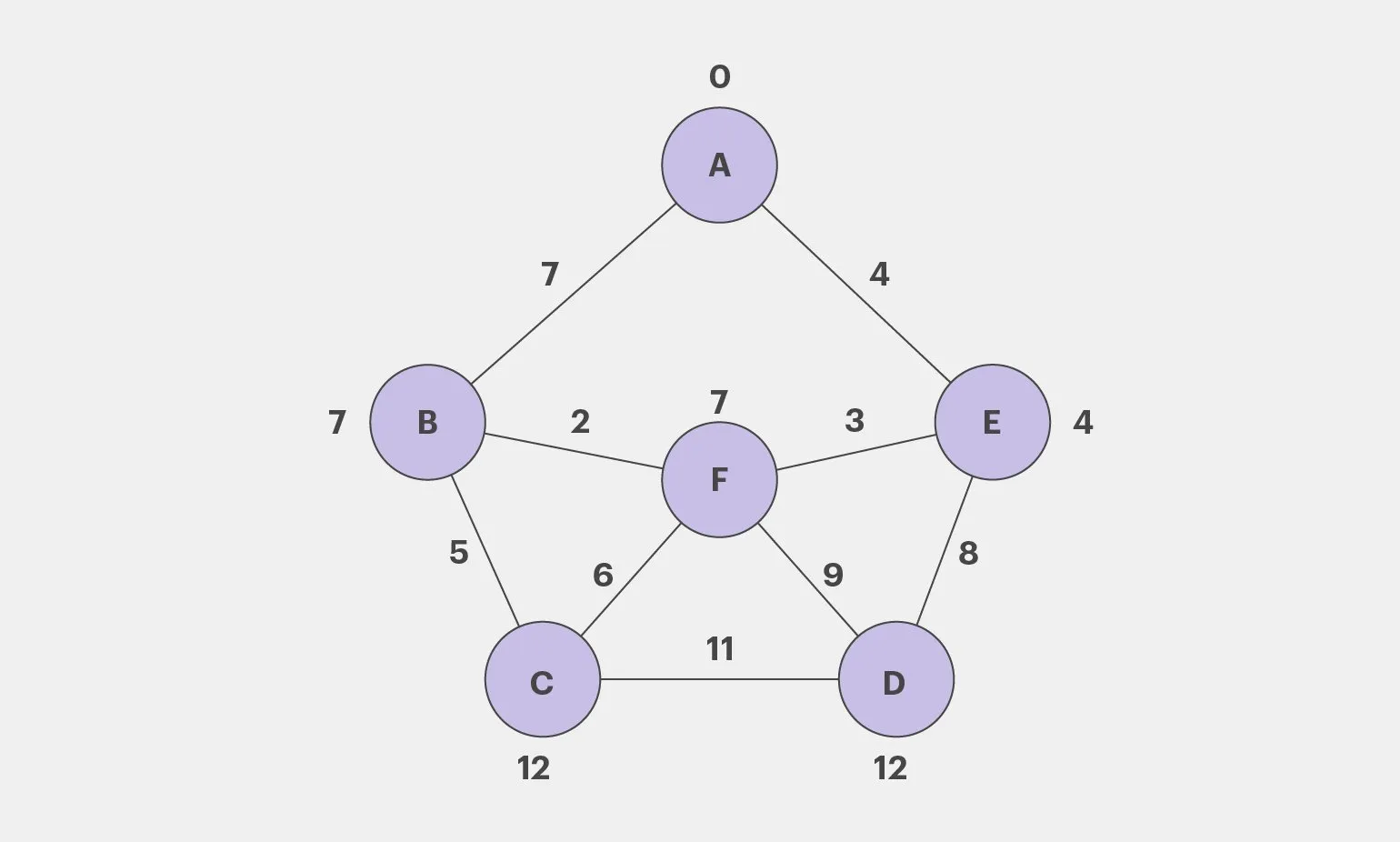
Nasza metoda pozwala określić najkrótsze trasy z punktu A do innych miast. Na przykład, możemy znaleźć optymalne trasy, uwzględniające różne czynniki, takie jak odległość, czas podróży i stan dróg. Pozwoli to na efektywne planowanie podróży i minimalizację kosztów transportu. Optymalizacja trasy nie tylko usprawnia logistykę, ale także zwiększa wygodę podróży dla użytkowników.
- Od A do F: A — E — F
- Od A do D: A — E — D
- Od A do C: A — B — C
Algorytm Dijkstry ma pewne ograniczenia. Można go stosować tylko w przypadku grafów ważonych, w których wagi krawędzi są znane z góry. Należy pamiętać, że wagi te muszą być nieujemne. Jeśli graf zawiera ujemne wagi krawędzi, algorytm Dijkstry nie da poprawnych wyników. Dlatego podczas pracy z grafami, które mogą zawierać ujemne wagi, zaleca się stosowanie algorytmów alternatywnych, takich jak algorytm Bellmana-Forda.
Historia algorytmu Dijkstry: od pomysłu do wdrożenia
Algorytm Dijkstry, opracowany przez holenderskiego naukowca Edsgera Dijkstrę w 1956 roku, stał się podstawą wielu współczesnych zastosowań w informatyce i nawigacji. Dijkstra chciał zademonstrować możliwości nowego komputera ARMAC i poszukiwał problemu, który byłby zrozumiały nawet dla osób bez wcześniejszego doświadczenia w informatyce. Algorytm ten skutecznie rozwiązuje problemy najkrótszych ścieżek w grafach, co czyni go niezbędnym narzędziem w wielu dziedzinach, od systemów informacji geograficznej po rozwój protokołów sieciowych. Algorytm Dijkstry pozostaje aktualny i cieszy się dużym zainteresowaniem specjalistów pracujących z dużymi wolumenami danych i złożonymi strukturami sieciowymi.
Edsger Dijkstra opracował algorytm znajdowania najkrótszej trasy, który stał się podstawą oprogramowania do nanoszenia tras na holenderską mapę transportową. Algorytm ten znacznie uprościł proces planowania podróży, stanowiąc istotny postęp w logistyce i transporcie. Jego opracowanie umożliwiło efektywne znajdowanie optymalnych tras, co pozytywnie wpłynęło na jakość usług transportowych i usprawniło zarządzanie podróżami.
Algorytm Dijkstry powstał w swobodnej atmosferze. W wywiadzie Dijkstra opowiedział, jak podczas kawy z narzeczoną na tarasie kawiarni w Amsterdamie stworzył algorytm znajdowania najkrótszej trasy w dwadzieścia minut. Algorytm ten został opublikowany trzy lata później, w 1959 roku. Algorytm Dijkstry stał się podstawą wielu zastosowań w optymalizacji tras i jest ważnym narzędziem w teorii grafów.
Jednym z powodów elegancji i wydajności algorytmu jest to, że został on opracowany mentalnie, bez użycia papieru i ołówka. Dijkstra zauważył, że jedną z zalet tego podejścia jest dążenie do minimalizacji złożoności. Ta metoda projektowania sprzyja jaśniejszemu myśleniu i pozwala skupić się na kluczowych aspektach problemu, co z kolei prowadzi do bardziej optymalnych rozwiązań.
Algorytm Dijkstry stanowi znaczące osiągnięcie w dziedzinie matematyki i informatyki. Był kluczowym czynnikiem popularności Edsgera Dijkstry jako naukowca. Sam Dijkstra zauważył, że algorytm ten, ku swojemu zaskoczeniu, stał się jednym z kamieni węgielnych jego sławy. Algorytm ten służy do znajdowania najkrótszej ścieżki w grafach i znajduje zastosowanie w różnych dziedzinach, w tym w sieciach, systemach transportowych i aplikacjach nawigacyjnych. Jego wydajność i prostota uczyniły go jednym z najbardziej znanych i szeroko stosowanych algorytmów w informatyce.
Aby lepiej zrozumieć algorytm i jego praktyczne zastosowania, warto zapoznać się z materiałami na stronie GeeksforGeeks oraz w Wikipedii. Zasoby te zawierają szczegółowe wyjaśnienia algorytmu Dijkstry, jego implementacji z wykorzystaniem kolejek priorytetowych oraz przykłady jego zastosowania w różnych problemach. Znajomość tych materiałów pomoże lepiej zrozumieć podstawowe zasady algorytmu i jego skuteczność w znajdowaniu najkrótszych ścieżek w grafach.
Algorytm Dijkstry nadal znajduje zastosowanie w różnych dziedzinach, takich jak systemy nawigacyjne i analiza sieci, co podkreśla jego wszechstronność i znaczenie we współczesnej technologii. Ta skuteczna technika znajdowania najkrótszej ścieżki pozwala na optymalizację tras i poprawę jakości usług w takich obszarach jak transport, telekomunikacja i systemy informacji geograficznej. Wykorzystanie algorytmu Dijkstry poprawia dokładność i szybkość przetwarzania danych, czyniąc go niezastąpionym narzędziem dla programistów i badaczy.
Algorytm Dijkstry w Pythonie: Implementacja krok po kroku
Teraz, gdy omówiliśmy podstawy teoretyczne, przejdźmy do części praktycznej i opracujmy kod implementujący algorytm Dijkstry w Pythonie. W tym przykładzie wyznaczymy najkrótsze odległości od wierzchołka A do wszystkich pozostałych wierzchołków grafu. Algorytm Dijkstry to skuteczna metoda rozwiązywania problemów najkrótszych ścieżek w grafach z nieujemnymi wagami krawędzi. Utwórzmy funkcję, która przyjmuje graf sformatowany słownikowo i wierzchołek źródłowy, a następnie zwraca najkrótsze odległości do wszystkich wierzchołków.
Aby algorytm działał efektywnie, konieczne jest użycie modułu heapq, który jest częścią standardowej biblioteki Pythona. Ten moduł umożliwia pracę ze stertami – unikalną strukturą danych, w której wartość węzła nadrzędnego jest zawsze mniejsza lub równa wartościom jego węzłów potomnych. Ta właściwość sterty umożliwia szybkie pobieranie minimalnego elementu, co czyni ją użyteczną w różnych algorytmach, w tym sortowaniu i implementacji kolejek priorytetowych. Użycie heapq znacząco optymalizuje operacje wstawiania i usuwania, co jest szczególnie ważne podczas przetwarzania dużych ilości danych.
Utwórzmy funkcję Dijkstra, która przyjmuje dwa argumenty: „graph”, reprezentujący nasz graf, oraz „start”, oznaczający wierzchołek początkowy. Ta funkcja zaimplementuje algorytm Dijkstry do znajdowania najkrótszej ścieżki od wierzchołka początkowego do wszystkich pozostałych wierzchołków w grafie. Algorytm Dijkstry sprawdza się w pracy z grafami, w których wszystkie krawędzie mają nieujemne wagi i pozwala znaleźć minimalne odległości do każdego wierzchołka. W implementacji funkcji wykorzystamy kolejkę priorytetową do optymalizacji wyszukiwania.
Wewnątrz funkcji inicjalizujemy słownik odległości, który będzie przechowywał odległości od wierzchołka początkowego do wszystkich pozostałych wierzchołków w grafie. Utworzymy również stos priorytetowej kolejki (priority_queue) w celu wygodnego pobierania wierzchołków o najmniejszych bieżących odległościach. Zoptymalizuje to proces znajdowania najkrótszych ścieżek i poprawi ogólną wydajność algorytmu.
Algorytm będzie sekwencyjnie aktualizował odległości do sąsiednich wierzchołków, aż znajdzie najkrótsze ścieżki do wszystkich wierzchołków w grafie. Wyniki algorytmu będą reprezentowane jako słownik, w którym kluczami są wierzchołki grafu, a wartościami minimalne odległości od punktu początkowego A do każdego z tych wierzchołków. Takie podejście pozwala na efektywne znajdowanie najkrótszych ścieżek, co jest ważnym aspektem w problemach związanych z grafami i optymalizacją tras.
Teraz obliczymy najkrótsze odległości dla naszego grafu. W tym celu graf będzie reprezentowany w formacie słownikowym, gdzie klucze odpowiadają wierzchołkom, a wartości są słownikami zawierającymi sąsiednie wierzchołki i wagi krawędzi. Takie podejście pozwala na wydajne przetwarzanie danych i znajdowanie optymalnych ścieżek między wierzchołkami, co jest kluczowym elementem teorii grafów i algorytmów wyszukiwania.
Po utworzeniu grafu wywołaj funkcję Dijkstry, przekazując jej wierzchołek A jako wierzchołek początkowy. Wynik funkcji zostanie wyświetlony w konsoli. Takie podejście pozwala na efektywne znajdowanie najkrótszej ścieżki od wierzchołka początkowego do pozostałych wierzchołków w grafie.
Pomyślnie ukończyliśmy implementację algorytmu Dijkstry w Pythonie. Algorytm ten znajduje najkrótsze ścieżki w grafach, co czyni go niezbędnym narzędziem w problemach optymalizacji tras. Możesz teraz użyć naszego kodu do rozwiązania różnych problemów związanych z analizą grafów i znajdowaniem optymalnych tras. Wykorzystanie algorytmu Dijkstry otwiera nowe możliwości rozwoju aplikacji w nawigacji, logistyce i analizie sieci.
Jeśli interesują Cię dodatkowe informacje i przykłady zastosowań tego algorytmu, polecam odwiedzenie źródeł takich jak GeeksforGeeks i Python.org. Strony te oferują obszerne informacje i praktyczne przykłady, które pomagają lepiej zrozumieć algorytm i jego zastosowanie w różnych scenariuszach.
Algorytm A*: Omówienie i zastosowanie
Algorytm A*, wymawiany jako „gwiazdka”, to skuteczne narzędzie do rozwiązywania problemów związanych z najkrótszą ścieżką. Opracowany w 1968 roku, znalazł szerokie zastosowanie w takich dziedzinach jak robotyka, systemy nawigacyjne i tworzenie gier wideo. A* to ulepszona wersja algorytmu Dijkstry, wzbogacona o dodatkowe funkcje, które znacznie zwiększają szybkość i efektywność wyszukiwania ścieżek. Dzięki możliwości uwzględnienia zarówno kosztu ruchu, jak i oszacowania pozostałej odległości do celu, algorytm A* zapewnia optymalne rozwiązania w złożonych sytuacjach.
Algorytm A* to wydajna metoda znajdowania optymalnej ścieżki od punktu początkowego do celu, podobna do algorytmu Dijkstry. Jednak A* wyróżnia się, ponieważ łączy dwa kluczowe elementy: rzeczywistą odległość od punktu początkowego i heurystyczną estymację odległości do punktu docelowego. Heurystyka w tym przypadku jest przybliżonym oszacowaniem, które znacznie przyspiesza proces wyszukiwania, czyniąc go bardziej inteligentnym. Dzięki temu połączeniu algorytm A* zapewnia szybsze znajdowanie optymalnej ścieżki w różnych aplikacjach, takich jak systemy nawigacyjne i gry.
Aby określić najkrótszą ścieżkę między miastami A i B, można użyć funkcji heurystycznej, takiej jak odległość euklidesowa. Odległość ta jest linią prostą od punktu bieżącego do punktu docelowego, co pozwala na efektywniejszą ocenę możliwych tras. Wykorzystanie odległości euklidesowej w algorytmach wyznaczania ścieżki, takich jak A*, znacznie przyspiesza proces znajdowania optymalnej trasy, gdyż oszacowanie to pomaga uniknąć niepotrzebnych objazdów i kieruje poszukiwania w stronę najbardziej obiecujących opcji. Zatem wykorzystanie funkcji heurystycznych jest kluczowym elementem w problemach optymalizacji tras.
Ten wykres przedstawia odległości heurystyczne od punktów pośrednich do celu podróży, ignorując istniejące trasy drogowe. Pozwala to na lepsze zrozumienie ogólnej struktury trasy i ocenę możliwych tras dotarcia do celu. Wizualizacja pomaga zidentyfikować optymalne kierunki podróży i potencjalne odchylenia od ustalonych tras, co może być przydatne przy planowaniu podróży lub analizie infrastruktury transportowej.
Odległość Manhattan jest jedną z dobrze znanych funkcji heurystycznych wykorzystywanych w różnych dziedzinach, w tym w informatyce i optymalizacji tras. Nazwa tej funkcji pochodzi od charakterystycznego układu ulic Nowego Jorku, gdzie ulice przecinają się pod kątem prostym. W takich warunkach podróżowanie między dwoma punktami wymaga poruszania się równolegle do osi współrzędnych. To sprawia, że odległość Manhattan jest szczególnie przydatna do oceny tras w środowiskach miejskich, gdzie ruch jest często ograniczony do linii prostych. Zastosowanie tej heurystyki pozwala nam skutecznie rozwiązywać problemy związane ze znalezieniem najkrótszej ścieżki i optymalizacją logistyki w środowiskach miejskich.
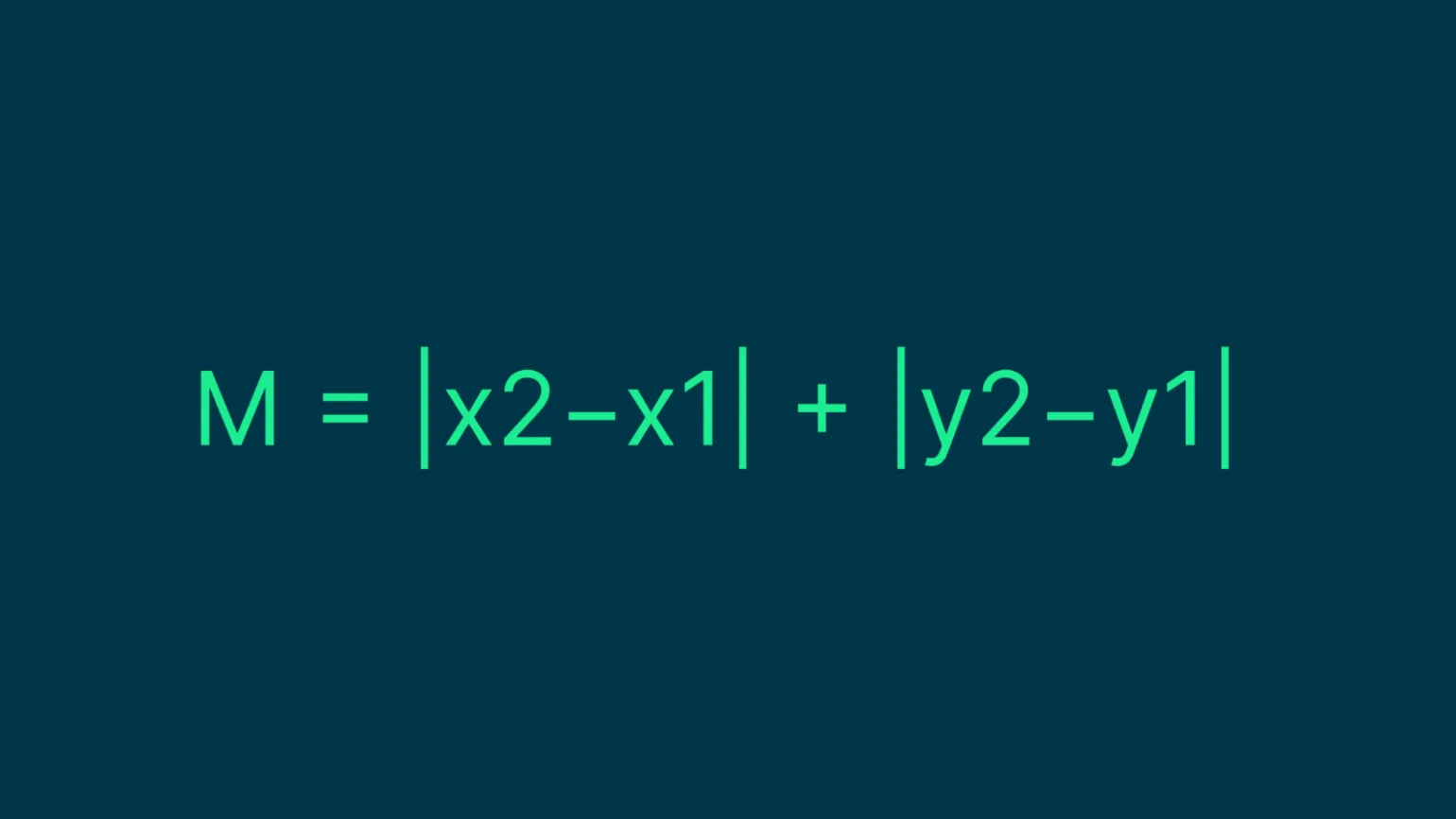
Do obliczenia odległości Manhattan między dwoma punktami o współrzędnych (x1, y1) i (x2, y2) stosuje się prosty wzór. Odległość Manhattan, znana również jako odległość miejska, jest definiowana jako suma różnic bezwzględnych ich współrzędnych. Wzór wygląda następująco:
D = |x1 — x2| + |y1 — y2|.
Ten wzór pozwala nam szybko oszacować odległość między dwoma punktami na płaszczyźnie, poruszającymi się tylko w pionie i poziomie, co czyni go szczególnie przydatnym w różnych dziedzinach, takich jak logistyka, robotyka i gry. Zrozumienie odległości Manhattan pomaga optymalizować trasy i minimalizować koszty podczas transportu obiektów w obszarach miejskich.
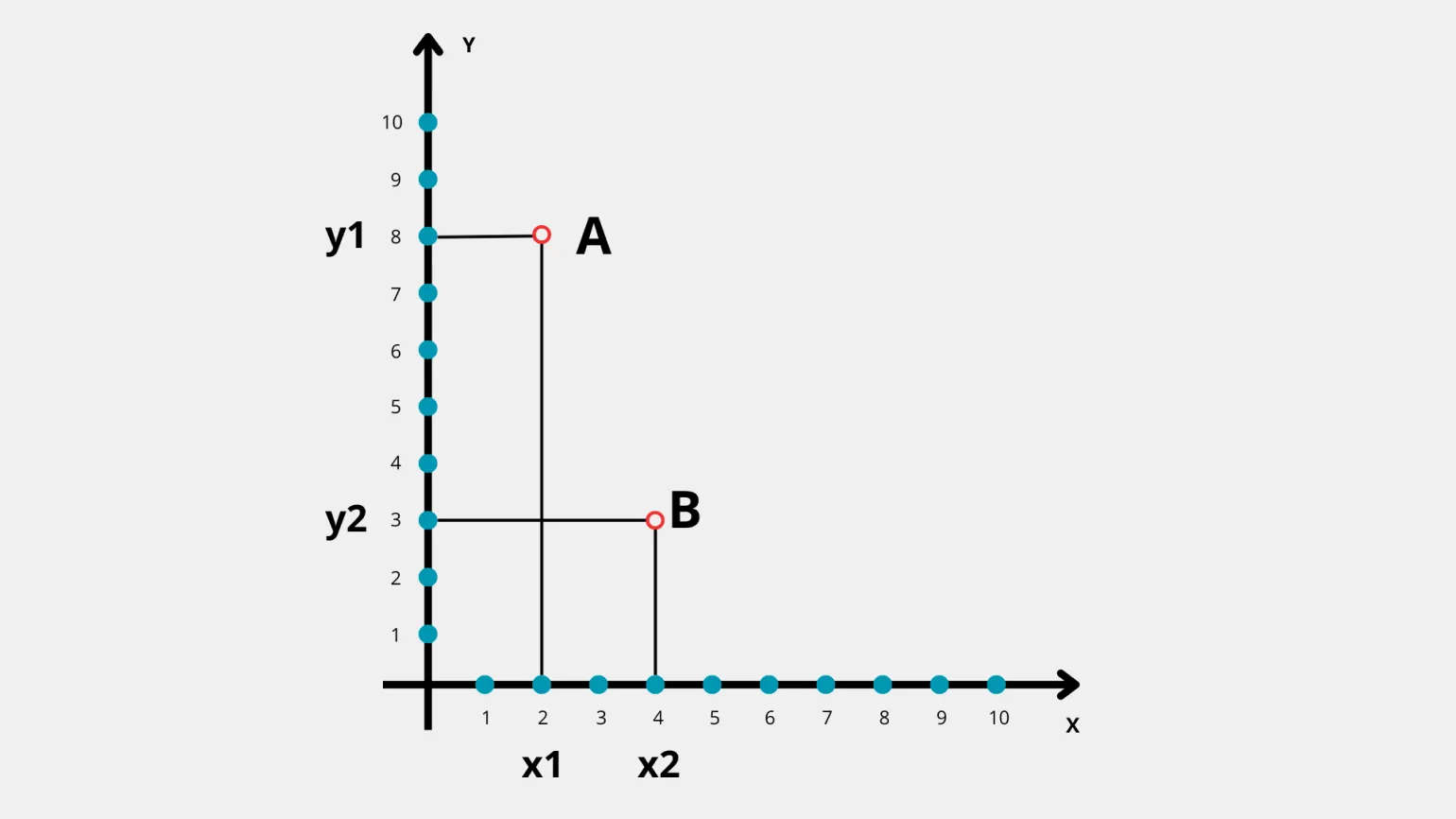
Przyjrzyjmy się przykładowi obliczania odległości Manhattan. Załóżmy, że punkt A znajduje się na współrzędnych (2, 8), a punkt B na współrzędnych (4, 3). Podstawiając te wartości do wzoru na odległość Manhattan, otrzymujemy: M = |4−2| + |3−8| = 2 + 5 = 7. Zatem odległość Manhattan między punktami A i B wynosi 7. Ta metoda jest przydatna do analizowania odległości w środowiskach miejskich, gdzie ruch odbywa się na prostych ulicach.
Algorytm A* opiera się na obliczaniu dwóch głównych wartości dla każdego wierzchołka w grafie. Pierwsza wartość to koszt ścieżki od wierzchołka początkowego do bieżącego, a druga to szacunek pozostałego kosztu ścieżki od wierzchołka bieżącego do celu. Algorytm łączy w sobie właściwości przeszukiwania wszerz i przeszukiwania zachłannego, umożliwiając efektywne znalezienie najkrótszej ścieżki. A* wykorzystuje również funkcję heurystyczną, która pomaga oszacować odległość do celu, znacznie przyspieszając proces wyszukiwania. A* jest wykorzystywany w różnych dziedzinach, takich jak planowanie tras, gry i robotyka, ze względu na możliwość znajdowania optymalnych rozwiązań w minimalnym czasie.
- g(n) to długość ścieżki od wierzchołka początkowego do bieżącego wierzchołka n.
- h(n) to heurystyczna ocena odległości od bieżącego wierzchołka n do celu.
Algorytm A* wybiera wierzchołek o minimalnej sumie g(n) + h(n) na każdym etapie, uważnie badając sąsiednie wierzchołki. Proces ten trwa aż do osiągnięcia celu końcowego. Współczesne badania potwierdzają, że algorytm A* nadal jest jednym z najskuteczniejszych rozwiązań problemów z odnajdywaniem ścieżki w czasie rzeczywistym. Jego zastosowania obejmują różne dziedziny, w tym robotykę, tworzenie gier i routing, co czyni go niezbędnym narzędziem optymalizacji i wydajności wyszukiwania.
Wydajna implementacja algorytmu A* w Pythonie
Rozważmy implementację algorytmu A* w Pythonie, wykorzystując odległość Manhattan jako heurystykę. Algorytm A* to wydajna metoda znajdowania najkrótszych ścieżek w grafach, co czyni go szczególnie użytecznym w siatkach dwuwymiarowych. W tym artykule omawiamy kluczowe aspekty algorytmu i przedstawiamy przykładową implementację w Pythonie. Użycie odległości Manhattanu pozwala na efektywne szacowanie odległości do celu, znacznie przyspieszając proces wyszukiwania. Algorytm A* łączy zalety algorytmu Dijkstry i metod zachłannych, co czyni go optymalnym wyborem w przypadku problemów z odnajdywaniem ścieżki.
Algorytm A* to wydajna metoda znajdowania ścieżki, która łączy rzeczywistą odległość od punktu początkowego do bieżącego z heurystycznym oszacowaniem odległości do celu. W tym kontekście funkcja manhattan_distance służy do obliczenia odległości Manhattan między dwoma punktami na siatce. To podejście pozwala algorytmowi A* na znajdowanie optymalnych tras w różnych problemach, takich jak nawigacja w grach czy planowanie tras w robotyce. Biorąc pod uwagę zarówno rzeczywiste, jak i szacowane odległości, algorytm A* zapewnia szybsze i dokładniejsze rozwiązanie niż inne metody wyszukiwania.
Główne kroki implementacji algorytmu A* obejmują następujące elementy:
Pierwszym krokiem jest zainicjowanie punktu początkowego i docelowego, gdzie określane są współrzędne i wartości potrzebne algorytmowi. Następnie konieczne jest utworzenie dwóch list: otwartej, która będzie zawierała węzły do oceny, oraz zamkniętej, która będzie zawierała węzły testowane.
Następnie rozpoczyna się główna pętla algorytmu, w której z listy otwartej wybierany jest węzeł o najniższym koszcie. Węzeł ten jest oceniany pod kątem obecności sąsiadów, którzy mogą stać się częścią ścieżki. Dla każdego sąsiada obliczane są wartości f f, g i h, gdzie f to całkowity koszt ścieżki, g to koszt od punktu początkowego do bieżącego węzła, a h to szacowany koszt ścieżki od bieżącego węzła do punktu docelowego.
Jeśli sąsiad nie został jeszcze dodany do listy otwartych węzłów, jest do niej dodawany. Jeśli znajduje się już na tej liście, porównywane są wartości g i w razie potrzeby aktualizowana jest ścieżka. Po przetworzeniu wszystkich sąsiadów bieżący węzeł jest przenoszony na listę zamkniętych węzłów.
Proces jest kontynuowany do momentu, aż lista otwartych węzłów będzie pusta lub do momentu znalezienia węzła docelowego. Jeśli cel zostanie znaleziony, algorytm zwraca znalezioną ścieżkę, która jest optymalna według podanych kryteriów.
W ten sposób algorytm A* skutecznie znajduje najkrótszą ścieżkę na grafach, wykorzystując kombinację heurystyki i szacowania kosztów.
Zdefiniowanie siatki 5×5, gdzie przeszkody są reprezentowane przez jednostki, to pierwszy krok w tworzeniu systemu najkrótszej ścieżki. Następnie konieczne jest zaimplementowanie funkcji odzyskiwania ścieżki, która będzie śledzić optymalną trasę z punktu A do punktu B. Następnie można uruchomić algorytm A*, który wyszukuje najlepszą ścieżkę przy danych przeszkodach, a wyniki można wyświetlić. Ten proces zapewni efektywne rozwiązanie problemu nawigacji w ograniczonej przestrzeni.
Po uruchomieniu tego algorytmu otrzymasz optymalną trasę z punktu A do punktu B. Jest to końcowy wynik kodu, który zapewnia najkrótszą ścieżkę.
Ten przykład ilustruje efektywne zastosowanie algorytmu A* do znalezienia optymalnej trasy na siatce, wykorzystując odległość Manhattan jako heurystykę. Algorytm A* to potężne narzędzie do rozwiązywania problemów nawigacyjnych i trasowania, pozwalające znaleźć najlepsze ścieżki w różnych aplikacjach, od map mobilnych po robotykę. Wykorzystanie odległości Manhattan znacznie przyspiesza proces wyszukiwania, zapewniając szybsze i dokładniejsze wyniki.
Aby uzyskać bardziej szczegółowe informacje i przykłady kodu, zalecamy zapoznanie się z oficjalną dokumentacją Pythona pod adresem https://docs.python.org/3/. Warto również zapoznać się z materiałami poświęconymi algorytmom, na przykład informacjami o algorytmie A* pod adresem https://www.geeksforgeeks.org/a-star-search-algorithm/. Te zasoby pomogą Ci pogłębić wiedzę i lepiej zrozumieć zastosowanie różnych algorytmów i bibliotek w Pythonie.
Porównanie algorytmu Dijkstry z algorytmem A*: Który wybrać?
Wybierając między algorytmami Dijkstry i A* do znajdowania najkrótszej ścieżki, należy wziąć pod uwagę specyfikę konkretnego problemu i dostępne dane. Każdy z tych algorytmów ma unikalne zalety i wady. Optymalne zastosowanie każdego z nich zależy od kontekstu, w jakim są używane, a także od wymagań dotyczących wydajności i dokładności wyszukiwania. Algorytm Dijkstry dobrze sprawdza się w przypadku problemów wymagających znalezienia najkrótszej ścieżki w grafach o jednakowej wadze, podczas gdy A* jest bardziej efektywny w rozwiązywaniu problemów z wykorzystaniem podejścia heurystycznego, umożliwiając szybsze znajdowanie optymalnych rozwiązań w dużych i złożonych grafach.
Kluczowe różnice między tymi dwoma podejściami zasługują na bardziej szczegółową analizę. Obie strategie mają swoje unikalne cechy, które mogą znacząco wpłynąć na wyniki. Aby dokonać świadomego wyboru, ważne jest rozważenie nie tylko ich zalet, ale także wad. Zastanówmy się, jak każde podejście wpływa na wydajność i wyniki, a także jakie czynniki należy wziąć pod uwagę przy podejmowaniu decyzji.
- Algorytm Dijkstry ma na celu znalezienie najkrótszej ścieżki od pojedynczego wierzchołka początkowego do wszystkich pozostałych wierzchołków w grafie. Natomiast algorytm A* koncentruje się na znalezieniu najkrótszej ścieżki do określonego celu, wykorzystując funkcję heurystyczną do oszacowania odległości.
- Jedną z głównych różnic jest to, że algorytm Dijkstry traktuje wszystkie wierzchołki jako równe i wybiera ten, który ma najkrótszą odległość od wierzchołka początkowego. Z kolei algorytm A* wykorzystuje funkcję heurystyczną, co czyni go szybszym i bardziej wydajnym, szczególnie w przypadku dużych i złożonych grafów.
- Algorytm Dijkstry może być mniej wydajny w przypadku dużych grafów, ponieważ przetwarza wszystkie możliwe wierzchołki, co wydłuża czas wykonania. Algorytm A* znacznie przyspiesza proces wyszukiwania dzięki możliwości ignorowania mniej obiecujących ścieżek.
Algorytm Dijkstry to doskonały wybór do znajdowania najkrótszych ścieżek z jednego wierzchołka do wszystkich pozostałych w grafach, zwłaszcza gdy brakuje informacji heurystycznych. Jego skuteczność została udowodniona w sytuacjach, gdy wymagane jest solidne i dokładne rozwiązanie. Jednocześnie, jeśli dostępne są informacje heurystyczne, które mogą przyspieszyć proces wyszukiwania, algorytm A* znacznie poprawia wydajność i pozwala na szybsze znajdowanie optymalnych ścieżek. Wybór między algorytmami zależy od specyficznych warunków problemu i dostępnych danych.
Wybierając między algorytmem Dijkstry a A*, należy wziąć pod uwagę specyfikę problemu, rozmiar grafu i dostępność informacji heurystycznych. Algorytm Dijkstry idealnie nadaje się do znajdowania najkrótszej ścieżki w grafach o równych wagach krawędzi, natomiast A* jest skuteczniejszy w sytuacjach, gdy dostępne są heurystyki, co pozwala na szybsze wyszukiwanie rozwiązań. Aby uzyskać bardziej dogłębne informacje i poznać zastosowanie tych algorytmów, warto skorzystać z zasobów takich jak GeeksforGeeks i Wikipedia, które oferują szczegółowe wyjaśnienia, przykłady i praktyczne wskazówki.
Programista Python: 3 projekty na udany start
Chcesz zostać programistą Pythona? Dowiedz się, jak 3 projekty pomogą Ci w karierze! Przeczytaj artykuł.
Dowiedz się więcej